Principal Investigator
Prabhat Kumar Mishra
Assistant Professor
Department of Aritificial Intelligence
IIT Kharagpur
Research
Reinforcement learning
Model predictive control
Fine tuning of Generative AI models
Autonomous navigation in rough terrain
We are looking for motivated students to work at the intersection of control and learning. We are working on both theoretical and empirical methods to develop new AI algorithms.
RHPI Lab at IIT Kharagpur is focused on research at the intersection of control theory and Artificial Intelligence (AI). The real world applications of AI require safety guarantee and explainability of the AI module. In addition, several modules such as sensing and perception, planning and action need to interact to complete the feedback loop. Our main focus is in planning and decision making but we also consider sensing and actuation along with the effects of communication channels whenever required.
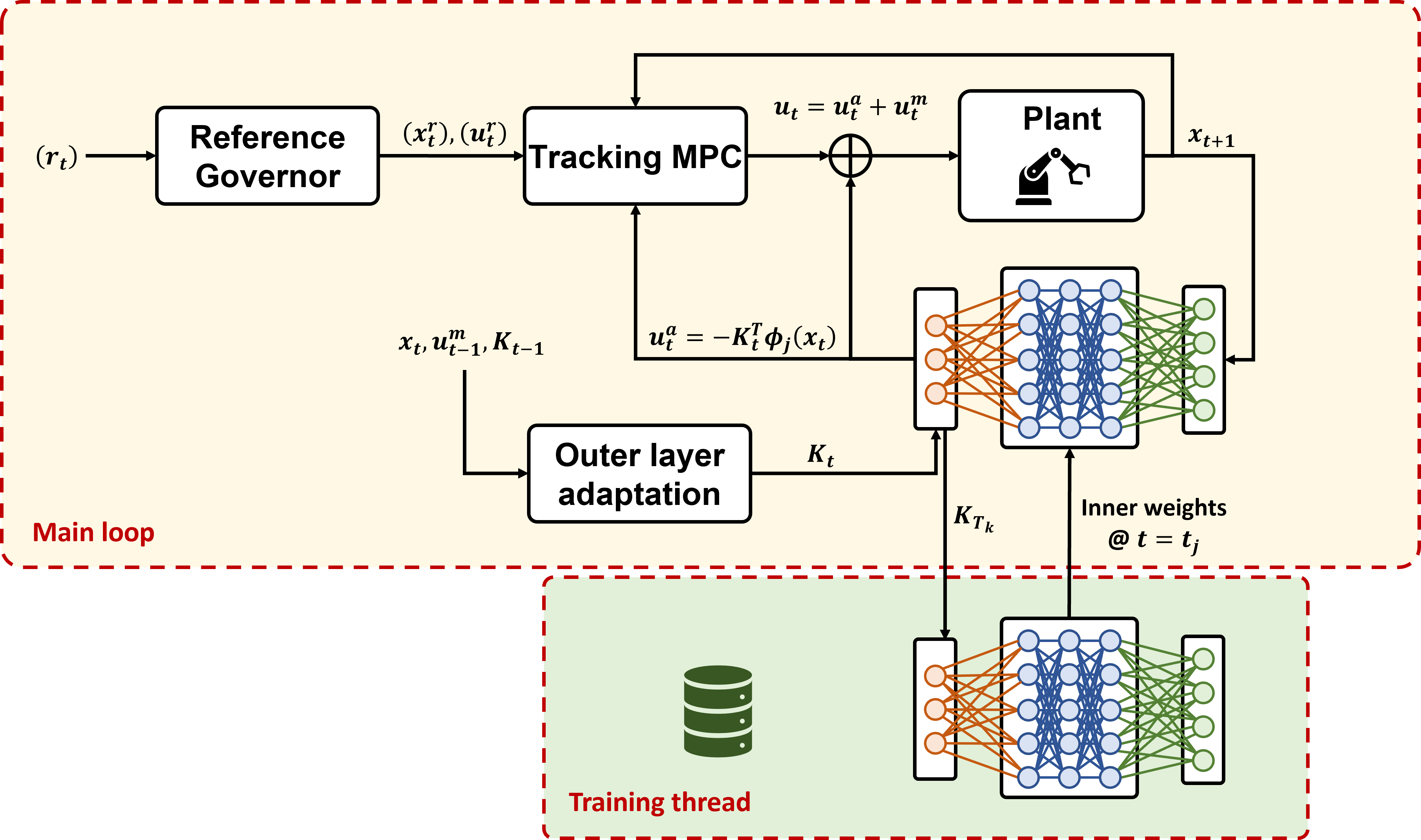
Deep MPC
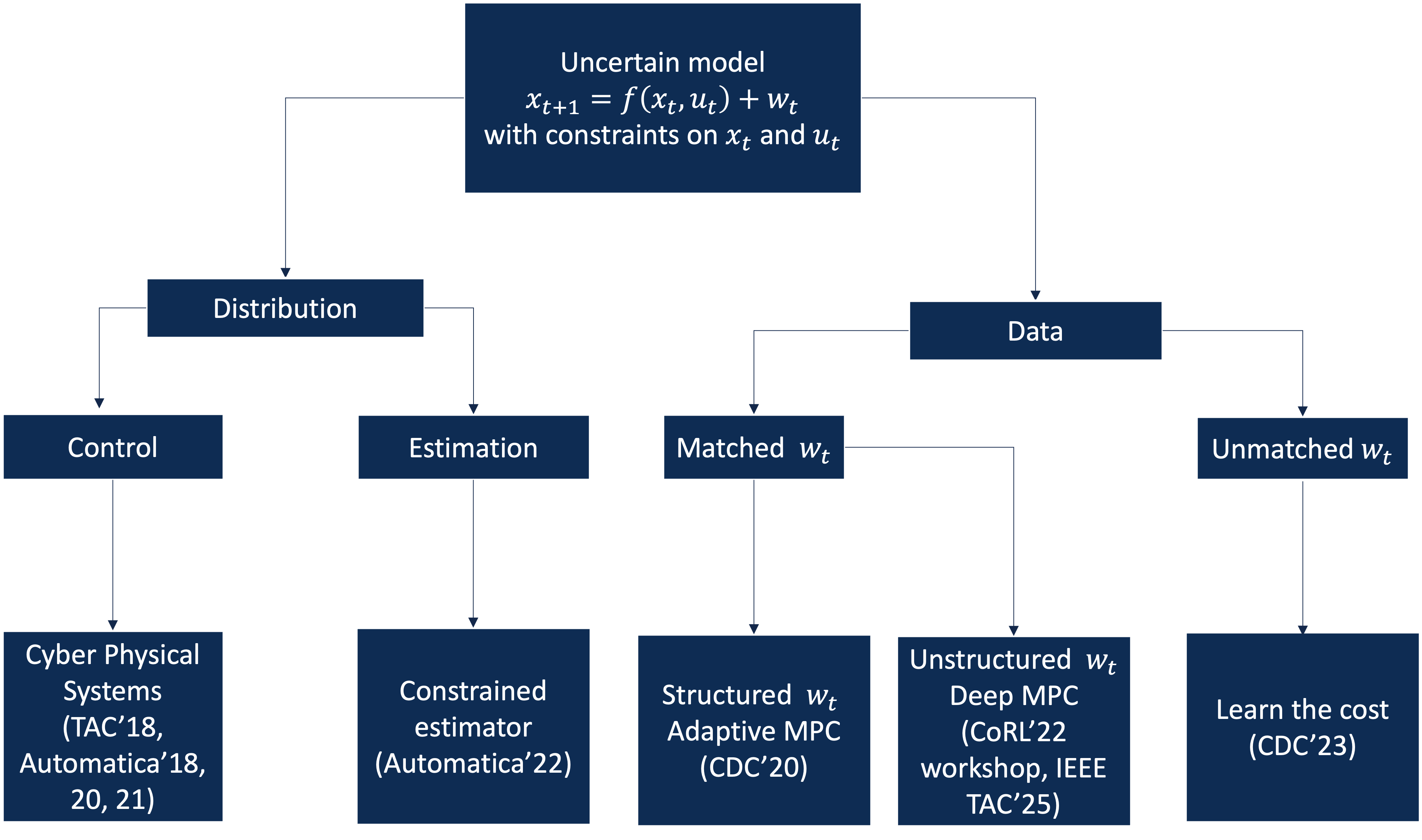
This paper presents a deep learning-based model predictive control algorithm for control affine nonlinear discrete-time systems with matched and bounded state-dependent uncertainties of unknown structure. Since the structure of uncertainties is not known, a deep neural network (DNN) is employed to approximate them. In order to avoid any unwanted behavior during the learning phase, a tube-based nonlinear model predictive controller is employed, which ensures satisfaction of constraints and input-to-state stability of the closed-loop states.
Algorithmic contributions
- We have developed several computationally tractable classes of policies.
- A moving horizon estimator developed by us exploits control-estimation duality.
- Our current focus is on theoretical deevelopments based on physics informed neural networks, neural operators, polynomial chaos theory.
Announcements and Acknowledgements
- [May, 2026] Our paper Polynomial chaos-based stochastic model predictive control: an overview and future research directions is accepted for publication in IEEE Control Systems Magazine.
- [Jan, 2026] Congratulations, Prof. Priyam Chakraborty for joining the Department of Aerospace Engineering as an Assistant Professor!
- [Dec, 2025] Our paper Algorithmic design and implementation considerations of deep MPC is accepted for publication in the 11th Indian Control Conference.
- [Dec, 2025] Thank you Prof. Pavan Tallapragada and Prof. Pushpak Jagtap for inviting Prabhat Kumar Mishra at the 11th Indian Control Conference as a young researcher.
- [Feb, 2025] Our paper Deep Model Predictive Control with stability guarantees is accepted for publication in IEEE Transactions on Automatic Control.
- [Jun, 2025] Thank you Prof. Rolf Findeisen for inviting Prabhat Kumar Mishra to visit Control and Cyber Physical Systems Laboratory, TU Darmstadt.
- [Dec, 2025] Thank you Prof. Shyam Kamal for inviting Prabhat Kumar Mishra as a speaker in an Online Refresher Course on "AI & Machine Learning Mastery: A Practical Refresher Course" under UGC-Malaviya Mission Teacher Training program (MM-TTP) organized by the Centre for Faculty Development & Educational Technology (CFDET) (Formerly, Teaching Learning Centre), Indian Institute of Technology (BHU), Varanasi.
- [Dec, 2025] Thank you Prof. Sushma Kamlu for organizing a faculty development program on "Current Trends in Control Engineering" at BIT Mesra and inviting Prabhat Kumar Mishra as a speaker to talk about "Deep model predictive control".
- [Jul, 2025] Thank you Prof. Gagan Deep Meena for organizing a faculty development program on "Advances in Control Engineering (ACE-2025)" at NIT Patna and inviting Prabhat Kumar Mishra as a speaker for a talk titled "Reinforcement learning: some theory some magic".
- [Jul, 2025] Thank you Prof. Pushkar Prakash Arya for organizing a Faculty Development Programme on "Theoretical Insights and Practical Strategies: Optimization, Control, Game Theory, and Reinforcement Learning (OCGR-2025)" at NIT Patna and inviting Prabhat Kumar Mishra as a speaker for a talk titled "A tour of reinforcement learning: from cart pole to large language models".
- [Jan, 2025] Thank you Dr. Manas Bera for inviting Prabhat Kumar Mishra for an expert talk on "Model Predictive Control with data and distribution" in the online STC & FDP, ACEOCPS-2025 organized by Dept. of Electrical Engineering, NIT Rourkela.
- [Dec, 2024] Thanks to Dr. Amit Kumar Chowdhary and the organizers of BITCON-2024 for inviting Prabhat Kumar Mishra as a keynote speaker to talk on "Safe interaction of an agent with the environment" at the 2024 IEEE Flagship International BIT Conference-2024 (BITCON-2024) at BIT Sindri.
- [Dec, 2024] Thanks to Prof. D. Debnath and Prof. R. S. Chakraborty for inviting Prabhat Kumar Mishra as a Meta-reviewer and session chair for IEEE INDICON 2024.
- [Oct, 2024] Thanks to Prof. Shreya Matilal for moderating the Symposium on Epistemological Innovation Reconnaissance of the Contours of Legal Research Methodology and to Prof. Arindam Basu for inviting Prabhat Kumar Mishra as a resource person to speak on "Computational legal research and artificial intelligence".
Sponsors


